requestId:689271d9b7a316.28112402.
中國網/中國發展門戶網訊 在過往幾十年中,計算行業已經成為全球經濟的關鍵驅動力,在經歷了個人計算、移動計算及云計算等多個發展階段后,機器人計算逐漸嶄露頭角。本文提出機器人計算的擴展和成長有其明確的軌跡,并將成為推動世界經濟的新引擎。
機器人計算系統的軟件與硬件統稱為機器人計算。隨著機器人計算的發展,機器人在執行復雜任務和覆蓋廣泛應用場景方面的才能進一個步驟晉陞,預示著生產力的新一輪飛躍。本文基于中國已構成的機器人產業鏈體系,聚焦于機器人計算這一焦點環節,以機器人應用軟件增長為驅動力,剖析機器人產業增長點;從編程語言、編譯器到硬件架構,旨在設計周全的機器人計算系統,為中國機器人計算的發展供給引領性和基礎性參考。
機器人計算的發展現狀及缺乏
今朝,中國已成為全球機器人市場的重要參與者之一。截至2022年,全球機器人市場總值達到513億美元,2017—2022年的均勻年增長率為14%,而中國的機器人市場規模達到了174億美元,2017—2022年的均勻年增長率更是高達22%;預計2024年,全球機器人市場將超過650億美元,此中工業機器人、服務機器人和特種機器人的市場都將衝破百億美金規模。伴隨年夜模子帶來更強年夜的智能決策和規劃才能,機器人計算將成為未來最主要的計算范式之一。針對機器人產業定義機器人計算范式,將成為未來10年內主導該產業的關鍵:①機器人計算像移動計算和云計算一樣,將開拓數以萬億的新市場,這一市場的潛力將通過更多智能化應用軟件獲得激活;②機器人計算的迅猛發展將依賴于研討者對編程語言和硬件的端到端開發和創新。
機器人計算概述
機器人凡是由本體和計算系統組成。本體是機器人與物理世界交互的組件;計算系統包含機器人上運行的算法與執行算法的計算硬件,是機器人完成任務的焦點系統,計算系統的智能化決定了機器人的才能下限。此中,廣義的計算系統凡是由3個部門組成: 感知模塊,由多種傳感器組成,負責采集環境信息; 計算模塊,通過感知信息的輸進對機器人行動進行決策; 把持模塊,將計算模塊的決策輸出到機器人本體并與環境進行交互。機器人應用軟件在機器人計算系統上運行,多種多樣的機器人應用軟件構成了機器人生態。本文重要關注以計算模塊為主的機器人計算領域,可是感知模塊與把持模塊同樣是機器人計算中主要的研討問題,將感知、計算與把持集成到統一款芯片上,構成“感—算—控”一體的解決計劃,也是當前的一個趨勢。
機器人計算的目標在于通過應用多種形態的機器人替換人類完成任務。當前,因為機器人的本錢進一個步驟下降,各行業應用機器人的意愿年夜年夜增強,機器人已在汽車制造、電子制造、倉儲運輸、醫療康復等多個行業被應用,并逐漸從傳統的單一簡單固定場景向長序列復雜場景進行應用轉換。
算力是機器人計算產業爆發式增長的關鍵
無論是個人計算、移動計算或許云計算的爆發,都來源于算力的增長,而算力的增長則源于半導體技術的發展。半導體技術的進步帶來了更多風趣、有興趣義的應用軟件,再由應用軟件拓展出更年夜的市場。以移動計算為例,盡管移動電話在20世紀初已經成為一種商品,但其效能單一,有超過90%的算力都被用于通訊相關的編碼、解碼計算,可被用于應用軟件的算力缺乏10%,整個移動計算的市場也僅有100億美元擺佈;隨著智妙手機的發展,算力不斷被晉陞,更充分的算力得以支撐搜刮、觀看視頻、游戲等更多應用軟件,移動計算生態系統的市場規模現在已經達到8 000億美元(圖1)。
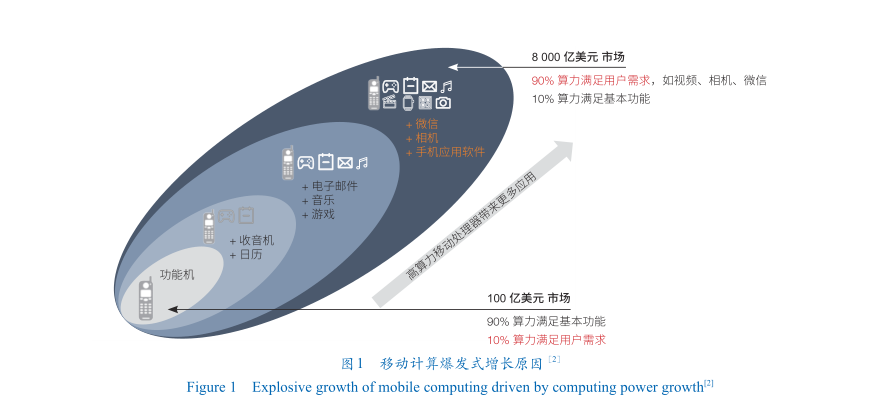
一個計算范式在步進成熟期之后,其市場規模遠超其對應的半導體市場。以移動計算為例,2022年,移動端處理器的市場規模約為350億美元,對應的mobile_phone市場規模為2 700億美元,而繁殖的移動計算市場規模則達VW零件到了8 000億美元,是移動處理器市場的23倍。同理,個人計算處理器的市場規模為550億美元,個人電腦的市場規模約為1 500億美元,而個人計算生態系統的市場規模達到了9 000億美元,是其對應半導體市場的16倍。
機器人計算的發展遠遠沒有達到上述移動計算和個人計算的規模,而主要瓶頸在藍玉華聞言,聽到蔡修的提議,心中暗喜。娘聽了她片面的言論後,真的不敢相信一切,把誠實不會撒謊的彩衣帶回來,真的于當前機器人計算系統的絕年夜部門算力仍被用于基礎效能。據筆者研討剖析,機器人計算系統設計將機器人計算才能的50%用于感知、20%用于定位、25%用于規劃,僅有5%用于應用軟件,這與移動計算時代初期的移動電話情況很是類似。在上述計算才能分派情況下,機器人無法執行智能任務,即機器人計算的生態系統幾乎不存在。
釋放軟件開發人員的想象力,構成機器人應用軟件的生態系統。本文認為包含感知、定位和規劃在內的基礎操縱應耗費不到20%的計算才能,從而將80%的計算才能留給應用軟件,還可定義更多風趣的機器人應用軟件,擴展機器人計算生態系統。例如,機器人計算的一個風趣應用軟件是自立移動福斯零件診所,它將能夠解決醫療服務的獲取和公正問題,根據病人的指令將醫療服務送到病人家門口。
機器人計算系統發展遠景
機器人計算系統的發展與機器人應用軟件的豐富水平是相輔相成的。對比火熱的人工智能應用軟件,機器人計算系統從編程語言到硬件架構都存在極好的發展潛力,但當前機器人計算系統的缺乏也是全棧的、多層次的。
供給開發者更不難懂得與操縱的編程語言和框架,允許應用軟件層面更靈活開發,束縛軟件開發者的限制,催生更多風趣的應用軟件。人工智能應用軟件在編程語言層面有著很是成熟且易于應用的框架,例如開源深度學習框架Pytorch學習本錢低且開發者可以較低本錢開發多種應用軟件。而對于機器人應用軟件而言,尚未出現類似Pytorch的編程語言或框架。對于開發者來說,機器人應用軟件的編程難度極高,需求把握大批關于機器人自己的獨特信息,如傳感器參數、機器人物理模子等。促進機器BMW零件人應用軟件的爆發,起首需求一套簡潔的、可編程的、面向對象的編程語言或框架,便利開發者對機器人進行編程。
促進機器人產業爆發式增長的關鍵在于通過機器人專用架構的設計,供給更多算力。類比通用圖形處理器(GPGPU)、神經網絡處理器(NPU)、張量處理器(TPU)之于人工智能算法,機器人的專用架構尚未被明確定義和提出,絕年夜多數機器人仍在應用通用硬件,導致大批算力被用于供給感知、定位、把持等機器人基礎計算上,無法支撐高智能化的應用軟件。
機器人編程語言
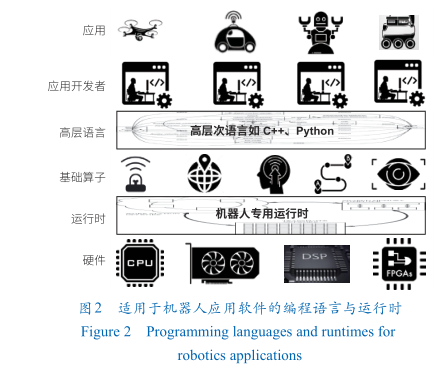
由于缺少傑出的系統抽象與運行時系統來治理實時約束和系統資源分派,法式員必須把握機器人應用軟件、機器人算法和計算系統方面的知識,導致機器人的編程任務極具挑戰性。為了將法式員從系統細節中束縛出來,油氣分離器改良版應該在已定義的汽車材料架構之上開發一個編程和運行系統(圖2),讓法式員只需幾行代碼就能開發出擁有分歧效能的機器人。
今朝,機器人根據其需求執行的各種任務依賴于大批的專用組件,包含定位和導航、目標檢測和規避等與內部環境相關的(硬)實時任務。每個任務都在嚴格的機能范圍水箱精內與其他任務進行數據通訊,但同時很能夠依賴的是判然不同的硬件目標,如應用中心處理器(CPU)進行調度、應用圖形處理器(GPU)進行神經網絡處理、應用現場可編程邏輯門陣列(FPGA)或數字信號處理技術(DSP)芯片進行圖像處理等。是以,應該汽車零件貿易商有一些具有表現力的“語言”,在高層次上描寫每項任務台北汽車材料應包汽車零件報價括的內容、適當的(特定領域的)語義,同時描寫“語言”之間的接口。
機器人作為一個整體,實時和運行時高低文可以不受拘束決定在目標任務運行過程中的某個特定時刻應用底層硬件的哪個部門來運行。為此,設計一套新的領域專用語言(DSLBenz零件)是需要的,但還缺乏夠。由于這些機器人至多有部門任務會嚴重依賴機器學習技術,是以還應該有一種方式將高級描寫下降到中間表現情勢,從而使編譯器能夠為異構設備系列天生代碼。
基于數據流圖的機器人編程語言
傳統機器人編程語言的設計,其目標并非為了便利開發者進行開發,而是為了保證通用且便利底層硬件的執行。絕年夜多數機器人的定斯柯達零件位、把持等模塊都基于傳統的面向過程的語言進行開發,較差的封裝性給應用軟件開發者帶來了極高的難度。盡管面向整體機器人應用軟件的編程語言或框架尚不存在,但研討人員已經針對機器人計算系統中的分歧模塊進行了編程語言或框架的開發,典範例子如面向視覺感知模塊中的圖像處理專用語言Halide、面向視覺感知模塊中常用算法深度神經網奧迪零件絡訓練與推理的專用框架Pytorch。
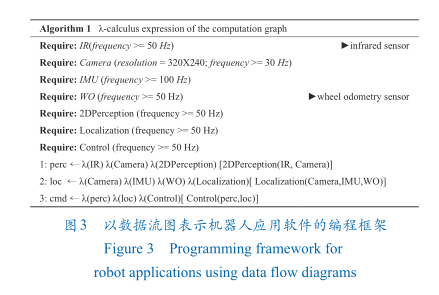
為解決機器人應用軟件缺汽車零件少一個編程語言框架問題,研討人員開發了一種簡潔精確的高級語言,用于表現機器人的計算圖,即一種原型語言。由于機器人計算可以用數據流圖來表現,是以函數式編程范式天然為描寫機器人的行為供給了一種有用的方式,有了函數式編程,法式員與開發者只需幾行說明和代碼就能描寫應用軟件(圖3)。
基于因子圖的機器人編程框架
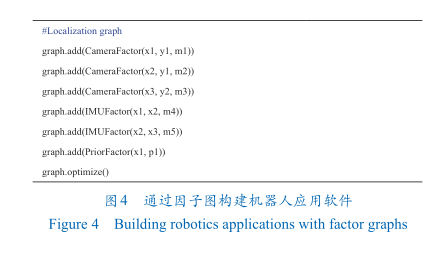
研討人員根據前文描寫的原型語言進行了實例化,提出了一個應用Python等高級語言構成的基于因子圖的機器人編程框架。這一編程框架解決了針對應用軟件開發者凡是對機器人傳感器的物理模子與參數清楚很少、但編程的時候經常需求應用的問題。將相機、激光雷達、慣性里程計等傳感器模子應用編程框架進行封裝,構成分歧的因子,開發者根據需求對分歧的因子進行Porsche零件拼接和組裝,構成因子圖。例如,開發者盼望機器人應用相機和激光雷達進行自我定位,那么開發者只需求通過選取相機因子和激光雷達因子構建定位的因子圖,即可描寫應用軟件(圖4)。
無論是面向單一模塊或面向整體機器人應用軟件,研討人員的任務都在嘗試解決機器人編程難這一問題。今朝,機器人計算系統研討者的共識是試圖通過面向對象的編程框架對機器人編程中常見又難以被開發者把握的傳感器模子進行封裝,從而年夜幅下降機器人編程難度。開發者應用機器人專用編程語言和框架可以年保時捷零件夜幅進步編程效力。但是,當前的編程模子依然與頂層應用軟件和算法存在必定的差距,研討人員在今朝的研討任務基礎上,對機器人編程語言和編輯框架進一個步驟完美,下降開發者在開發機器人應用軟件時的難度。
機器人計算專用架構
台北汽車零件賦能機器人多樣才能的關鍵在Audi零件于機器人芯片算力的晉陞,而硬件架構的專用化則是實現這一目標的手腕。以移動計算為例,移動mobile_phone的處理器從效能很是簡單的英國ARM公司生“我一定會坐大轎子嫁給你,有禮有節進門。”他深情而溫柔地看著她,用堅定的眼神和語氣說道。產的芯片,逐漸進步到當前效能復雜的專用計算片上系統,包含了信號處理專用電路、圖像處理專用電路、視頻編解碼電路、神經網絡推理電路等多種移動計算領域獨有的定制電路。定制電路是為機器人設計專用化、高算力的片上系統與解決機器人應用算力缺乏的最好途徑。以下將摸索并介紹3種分歧的專用架構設計思緒,包含基于數據流的加快器架構,基于因子圖的加快器架構和基于學習的加快器架構。
基于數據流的加快器架構
“花兒,誰告訴你的?”藍沐臉色蒼白的問道。席家的勢利眼和冷酷無情,是在最近的事情之後才被人發現的。花兒怎麼會知基于數據流的加快器架構的焦點思惟是摒棄傳統的依照把持流指定的明確順序執行指令的傳統架構。把持流限制了可以應用指令級并行性(ILP)的窗口,人為地設置了機能障礙。路上餓了可以吃。而這個,妃子還想放在同樣的方法。在行李裡,但我怕你不小心弄丟了,還是留給你隨身攜帶比較安全。”在數據流架構中,指藍寶堅尼零件令的執行是由數據驅動的,原則上只需指令的一切輸進可用,指令就會執行,而不是在把持流到達指令時執行。
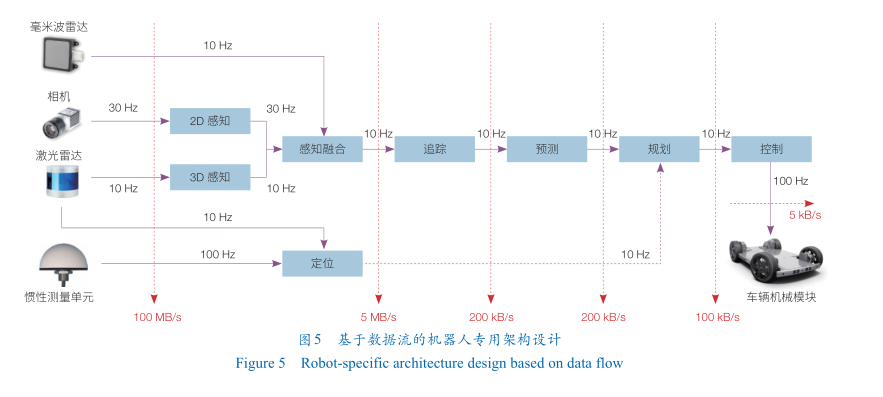
研討人員凡是可將傳統法式中的瓶頸與機器人軟件中的瓶頸進行類比,兩者都可以通過數據流道理加以解決,這種抽象的關鍵在于機器人的軟件棧。例如,將自立車輛計算圖(圖5)視為宏數據流圖(M-DFG),此中每個節點代表定位和運動規劃等單個高級任務。這種實現方法催生了數據流加快器架構(DAA)的概念,在這種架構中,加快器通過專用的片上緩沖器直接彼此通訊,并自立協調。這種架構形式有2個優勢:供給了更高程度的并行性,只需輸進數據準備就緒,每個加快器就會啟動;通過讓消費者更不難獲得操縱數來加速加快器的啟動速率,即通過允許生產者和賓士零件消費者應用每個加快器的片上緩沖區直接通訊而不是通過主存儲器來實現的。
基于因子圖的加快器架構
機器人專用架構設計的一年夜難點在于系統的疏散性和多樣性。分歧于一切智妙手機都具有的效能類似的通訊、編解碼、圖像處理等模塊,機器人根據其形態、感化等方面的區別,效能模塊差距極年夜。以定位算法為例,室內服務機器人與室外的自動駕汽車材料報價駛汽車的定位算法區別極年夜;以定位模塊為例,研討人員提出了大批針對某一種定位算法的專用加快芯汽車零件進口商片。是以,設計機器人的專用架構設計并不缺乏點到點的解決計劃,而是缺乏系統級的通用設計方式。
發佈留言